Assistant Professor
Univeristy of Campinas, School of Mechanical Engineering

An electrical engineer, André R. Fioravanti is an Assistant Professor at Univeristy of Campinas, Brazil and class 2 researcher from CNPq. His research spans from control and dynamical systems to optimization methods and simulation. He focuses on questions about stability and performance of dynamical systems, decision making through mathematical programming and complex systems simulation.
He has joint projects with INRIA, CTI, UNISIM and ACCES Laboratories.
Univeristy of Campinas, School of Mechanical Engineering
Petróleo Brasileiro S.A., Petrobras University
University of Campinas, School of Electrical Engineering
AsGa S.A., R&D team.
Ph.D. in Physics
Université Paris Sud XI
M.Sc. in Automatic Control
Univeristy of Campinas
Bachelor of Electrical Engineering
Univeristy of Campinas
Control and Automation Engineering - Unicamp. Class of 2010.
Researchers who stand out among their peers, valuing their scientific production according normative criteria established by CNPq, and specific, by the CNPq assistance committees.
Support the installation, modernization, expansion or recovery of scientific and technological research infrastructure in public education and research, in order to support the establishment of young researchers and the nucleation of new groups.
His main areas of expertise are control and dynamical systems, optimization techniques and mathematical tools for decision-making.
Named a Class 2 CNPq Researcher in 2015, thus acknowledging his productivity and ability to conduct high-level research.
Most dynamical systems present delays in their inner structure due to phenomena as, for example, transport, propagation or communication, but most of the time they are ignored for the sake of simplicity. On the other hand, those delays can be the cause of bad performance or even instability, and therefore, in order to analyse properly and design controllers for those systems, it is mandatory to take their effects into account. Another important source of delay is the feedback control itself, with this delay induced by the sensors, actuators and, in more modern digital controllers, the time of calculation. They naturally appear in the modelling of various processes found in physics, mechanics, circuits, economics, biology, and many others.
This project, in collaboration with INRIA/Supélec, consists in providing new theoretical and numerical tools for analysis and control of such systems. Requirements for a good candidate are strong mathematical background and familiarity with numerical programming and optimization.
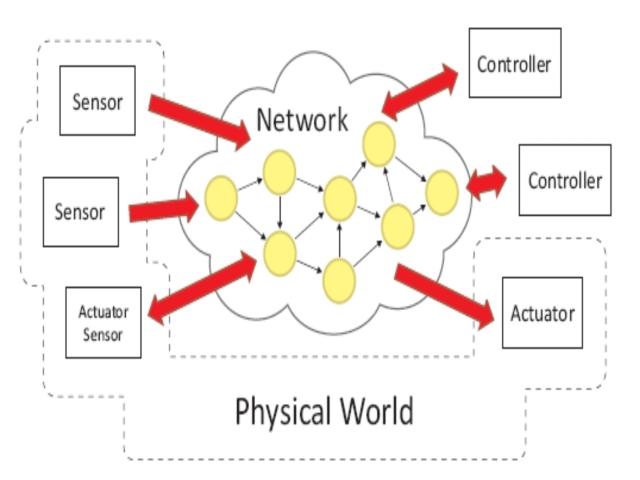
The classic control theory does not take into account any physical limitation in communication networks when modeling the data transmission between plant and controllers or filters. Such phenomena can impact the system performance and even make it impossible to implement them, unless they are taken into account during the project. We aim to study such limitations and incorporate aspects from communication theory into control and filter design. Specifically, the study will focus on the packet dropout, constrained switching and transmission delay. In order to deal with packet dropouts, stochastic modeling of such transmission failures, based on Markov chains, can be incorporated into the Markov Jump Linear Systems framework. Considering the second subject, we seek to study switched systems where the transitions are not arbitrary, but depend on a known direct graph which informs which jumps between different modes are allowed. Finally, the transmission delays may be incorporated into the overall project, however, the system will be of infinite dimension.
Published 1 book, 1 book chapter, 19 journal papers in scientific high-quality international journals, and 35 conference papers. ISI Web of Science lists more than 185 citations to these articles (H-index = 9), Scopus lists more than 265 citations (H-index = 10) and Google Scholar over 410 citations (H-index 11). Personal copies of the articles may be obtained under request.
In this paper we consider linear fractional systems of commensurate orders and with commensurate delays, whose characteristic equation is a polynomial in the two variables sα (0 < α < 1) and e-s τ (τ > 0). These systems may have single or multiple chains of poles asymptotic to the imaginary axis. Location of poles of large modulus belonging to these chains are determined by approximation and simple necessary and sufficient H∞-stability conditions are derived.
This paper provides the optimal solution of the filtering design problem for a special class of discrete-time Markov jump linear systems whose transition probability matrix has identical rows. In the two-mode case, this is equivalent to saying that the random variable has a Bernoulli distribution. For that class of dynamic systems we design, with the help of new necessary and sufficient linear matrix inequality conditions, H2 and H∞ optimal mode-independent filters with the same order of the plant. As a first proposal available in the literature, for partial information characterised by cluster availability of the mode, we also show it is possible to design optimal full-order linear filters. If some plant matrices do not vary within the same cluster, we show that the optimal filter exhibits the internal model structure. We complete the results with illustrative examples. A realistic practical application considering sensors connected to a network using a communication protocol such as the Token Ring is included in order to put in evidence the usefulness of the theoretical results.
The continuous search for new Lyapunov functions for nonlinear system has brought several approaches and techniques. Generally, dealing with a nonlinear system is a difficult problem. However, during the last decade, the sum of squares (SOS) approach has presented relevant results, transforming the polynomial positivity problem into the search for polynomials that can be represented as a sum of squares of polynomials, which can be more easily treated by means of semidefinite optimization. In this paper, we will present a numerical comparison between different approaches of search for Lyapunov functions while maximizing the region of attraction (ROA) using SOS. For high-dimensional systems, SOS constraints may demand an excessive computational requirement, precluding the use the method. Alternatively, it is possible to relax the semidefinite cone by means of stronger conditions but computationally more tractable optimization problems. With the properties of diagonally dominant matrix theory, we may rewrite SOS constraints as diagonally- dominant-sum-of-squares (DSOS) constraints. Accordingly, for Lyapunov functions of the same order, the ROA obtained will be smaller. In a resembling way, the use of the scaled diagonal dominance (SDSOS) approach presents less conser- vatism when compared with DSOS conditions, and therefore a better approximation for the ROA. These new approaches compromise conservativeness of the results with less computational effort. Nevertheless, high dimensional systems or high order Lyapunov functions that reached the limits of available solvers are now solvable with these alternatives ap- proaches. For illustration, we use the reverse-time Van der Pol Oscillator as example, presented both in continuous and discrete-time.
This paper analyses discrete-time switched systems in which a control engineer designs each mode so that performance guarantees are met. Given this setting, our objective is then to identify the set of mode transitions so that stability is guaranteed under arbitrary switching. Namely, our specific objective is to identify the stability graph associated with a given switching system. These systems are important for multi-controller architectures in many practical applications. Specifically, we develop convex conditions that ensure asymptotic stability and guaranteed quadratic performance for constrained switched systems. Then, a greedy algorithm based on the graph associated with the switched system is designed in order to determine a set of switching functions for which stability is guaranteed. We then further restrict the graph so that performance metrics are met. Simulations are given to illustrate the efficacy of the procedures.

YALTA is a Matlab toolbox dedicated to the H∞-stability analysis of classical and fractional systems with commensurate delays given by their transfer function, whose binary can be downloaded at http://team.inria.fr/disco/software/. Delay systems of both retarded and neutral type are considered. The asymptotic position of high modulus poles is given. For a fixed known delay, poles of small modulus of standard delay systems are approximated through a Padé-2 scheme. For a delay varying from zero to a prescribed positive value, stability windows as well as root loci are given. We describe how we have circumvented the numerical issues of algorithms developed in [6, 8] and several examples are given.
This paper addresses the H2 state estimation problem in the context of sampled-data systems, which is closely related to H2 filtering design under limited bandwidth constraints. Our first approach considers a fixed data-rate setting, for which a discrete-time equivalent system is devised and, based on this concept, sufficient conditions for the H2 filtering design are yielded. These results are then generalized to obtain a robust filter that is able to cope with uneven data-rates. Academical examples illustrate the theoretical results and point out the main characteristics of the design techniques devised in this paper.
This paper deals with state-feedback control of discrete-time linear jump systems. The random variable representing the system modes has a generalized Bernoulli distribution, which is equivalent to a Markov chain where the transition probability matrix has identical rows. Another assumption is about the availability of the mode to the controller. We derive necessary and sufficient linear matrix inequalities (LMI) conditions to design optimal H2 and H∞ state-feedback controllers for the particular class of transition probabilities under consideration and subject to partial mode availability constraints or equivalently cluster availability constraints, which include mode-dependent and mode-independent designs as particular cases. All design conditions are expressed in terms of LMIs. The results are illustrated through a numerical example.
This paper analyses the design of switched control of continuous-time switched systems, satisfying dwell-time constraints. These constraints are normally imposed to avoid the undesired phenomenon of chattering, which can damage physical devices used in the implementation of such systems. To this end, we define a discrete-time constrained switched system, which, together with sampled-data techniques, allows us to model this problem and design the switching rule, ensuring stability and performance to the closed-loop system. Numerical examples illustrate the developed theory.
This paper addresses the H2 output-feedback control of Markov Jump Linear Systems (MJLS) in continuous-time through Linear Matrix Inequalities (LMIs). We derive new sufficient LMI conditions for the case with completely known transition rates which are affine with respect to these parameters. Then, we treat the case where transition rates are considered uncertain, but belong to a given convex set. We illustrate our results through a numerical example.
This paper addresses the H2 and the H∞ state-feedback control of Markov Jump Linear Systems (MJLS) in continuous-time through Linear Matrix Inequalities (LMIs).We derive new necessary and sufficient LMI conditions for the case with completely known transition rates which are affine with respect to these parameters. Then, we treat the case where transition rates are considered uncertain, but belong to a given convex set. We illustrate the quality of our results through a numerical example.
Este artigo aborda os projetos de controle H2 e H∞, via realimentação de estado, de sistemas lineares a tempo contínuo sujeitos a saltos markovianos por meio de desigualdades matriciais lineares (LMIs). Obtivemos novas condições necessárias e suficientes para estabilidade na média quadrática e cálculo de normas H2 e H∞ para o caso com taxas de transição completamente conhecidas de forma que as LMIs sejam afins com relação a esses parâmetros. Em seguida, tratamos o caso em que as taxas de transição s˜ão consideradas incertas, mas pertencem a um determinado conjunto convexo. Nós ilustramos a qualidade dos nossos resultados através de um exemplo numérico
Discrete-time Markov jump linear systems (MJLS) and switched linear systems (SLS) stability, H2 and H∞ performance conditions can be very similar, and we explore those similarities in this paper. First of all, starting from the fact that MJLS second moment stability can be checked through four different linear matrix inequalities (LMIs), we show how one LMI condition can be obtained from the other using only LMI manipulations. Then, we show the Lyapunov–Metzler stability condition of SLS may also be checked through equivalent matrix inequalities and apply the same steps for H2 and H∞ performances, obtaining new conditions for both MJLS and SLS. Special attention is given to the case where the transition probabilities are independent of the mode, which is equivalent to consider the Metzler matrices on SLS framework to have identical columns. Finally, we propose a method to design a switching rule based on a randomly generator with given probability distribution.
This paper analyzes the concept of consistency for discrete-time switched linear systems having the switching function as a primary control signal to be designed, and also proposes a certification of how consistent is such switching function. A state feedback switching control strategy is strictly consistent whenever it improves performance compared to the ones of all isolated subsystems. Under certain conditions, it is shown that a min-type switching strategy is strictly consistent for classes of H2 and H∞ performance indexes. This property makes clear the importance of switching systems control design in both theoretical and practical application frameworks. The theory is illustrated by means of academic examples.
This article addresses the H∞ output feedback control for discrete-time Markov jump linear systems. With fully known transition probability, sufficient conditions for an internal model based controller design are obtained. For the case where the transition probabilities are uncertain and belong to a convex polytope with known vertices, we provide a sufficient LMI condition that guarantees the inline image norm of the closed-loop system is below a prescribed level. That condition can be improved through an iterative procedure. Additionally, we are able to deal with the case of cluster availability of the Markov mode, provided that some system matrices do not vary within a given cluster, an assumption that is suitable to deal with packet dropout models for networked control systems. A numerical example shows the applicability of the design and compares it with previous results.
This paper addresses the H2 state estimation problem in the context of sampled-data systems, which is closely related to H2 filtering design under limited bandwidth constraints. First, a fixed data rate problem is solved using a discrete-time equivalent system and this formulation yields sufficient conditions for H2 filtering design. A robust sampled-data estimator is developed to generalize the previous procedure, allowing the sampling period to become a bounded unknown variable. Numerical examples illustrate the theoretical results and point out some of the most important characteristics of the filter design problem under consideration.
In this paper we work with the filtering problem for a special class of discrete-time Markov Jump Linear Systems (MJLS) whose transition probability matrix has identical rows. For that class of systems we design, with the help of new necessary and sufficient LMI conditions, H2 optimal mode-independent filters with the same order of the plant. For cluster availability of the mode, we also show it is possible to design optimal filters. We complete the results with a numerical example.
In this paper, we describe YALTA, a matlab toolbox dedicated to the H∞-stability analysis of classical and fractional systems with commensurate delays given by their transfer function. Delay systems of both, retarded and neutral type are considered. Asymptotic position of high modulus poles are given. For a fixed known delay, poles of small modulus of standard delay systems are approximated through a Pade2 scheme. For delays varying from zero to a prescribed positive value, stability windows as well as root loci are given. We deeply describe how we have circumvented the numerical issues of algorithms developed in former papers of the same authors as well as the limitations of this toolbox. Finally, several examples are given.

This book has as its main objective the study of methods for analysis and control of time-delay systems. The link between all the themes is the use of methods in frequency domain as the basic tools. Therefore, we achieve results with low degree of conservatism in synthesis, and necessary and sufficient conditions in analysis, which is, up to now, virtually impossible via the Lyapunov-Krasovskii functional. We can also deal in the same framework with the class of fractional systems, a subject which is gaining importance both in theoretical as well as in practical aspects of engineering. Time-Delay Systems are dealt here in a broad sense, with theoretical results covering both the analysis and synthesis of filters and controllers. Some applied computational points are also presented.
TThe aim of this paper is to present new results on H∞ control synthesis for time-delay linear systems. We extend the use of a finite order LTI system, called comparison system to H∞ analysis and design. Differently from what can be viewed as a common feature of other control design methods available in the literature to date, the one presented here treats time-delay systems control design with classical numeric routines based on Riccati equations arisen from H∞ theory. The proposed algorithm is simple, efficient and easy to implement. Some examples illustrating state and output feedback design are solved and discussed in order to put in evidence the most relevant characteristic of the theoretical results. Moreover, a practical application involving a 3-DOF networked control system is presented.
This paper aims to provide a numerical algorithm able to locate all unstable poles, and therefore the characterization of the stability as a function of the delay, for a class of linear fractional-order neutral systems with multiple commensurate delays. We start by giving the asymptotic position of the chains of poles and the conditions for their stability for a small delay. When these conditions are met, the root continuity argument and some simple substitutions allow us to determine the locations where some roots cross the imaginary axis, providing therefore the complete characterization of the stability windows. The same method can be extended to provide the position of all unstable poles as a function of the delay.
This paper addresses the H∞ state-feedback control of Markov Jump Linear Systems (MJLS) through Linear Matrix Inequalities (LMIs). First, under the assumption that the Markov parameter is measured, the main contribution is on the LMI characterization of all linear feedback controllers such that the closed loop output remains bounded by a given norm level. This result allows the robust controller design to deal with convex bounded parameter uncertainty, probability uncertainty and cluster availability of the Markov mode. For partly unknown transition probabilities, the proposed design problem is proved to be less conservative than the one already available. For the case where each transition probability is considered unknown and belonging to a given interval, we also prove that our conditions are less conservative than a previous result from the literature. Under cluster availability of the Markov modes, we incorporate several models for measurement transmission network channels, such as the generalized Gilbert–Elliot, Fritchman or McCullough ones, into the MJLS framework. An example is solved for illustration and comparisons.
Classical proper PID controllers are designed for linear time invariant plants whose transfer functions are rational functions of sα, where 0 < α < 1, and s is the Laplace transform variable. Effect of input–output time delay on the range of allowable controller parameters is investigated. The allowable PID controller parameters are determined from a small gain type of argument used earlier for finite dimensional plants.
Discrete-time Markov jump linear systems (MJLS) and switched linear systems (SLS) stability, H2 and H∞ performance conditions are very similar. Starting from the fact that MJLS second moment stability can be checked through four different linear matrix inequalities (LMIs), we show how one LMI condition can be obtained from the other. Then, we show the stability of SLS may also be checked through equivalent matrix inequalities and apply the same steps for H2 and H∞ performances, obtaining new conditions for both MJLS and SLS. Special attention is given to the case where the transition probabilities are independent of the mode, which is equivalent to consider the Metzler matrices on switched linear systems framework to have identical columns.
Ce papier traite la commande H∞ par retour de sortie des systèmes linéaires markoviens (MJLS - de l'anglais Markov Jump Linear Systems) en temps discret. Quand la probabilité de transition est entièrement connue, on obtient des conditions suffisantes pour la conception d'un contrôleur basé dans le modèle interne du système. Dans le cas où les probabilités de transition sont incertaines et appartiennent à un polytope convexe dont les sommets sont connus, nous fournissons une condition suffisante par LMI qui garantit que la norme H∞ du système en boucle fermée est inférieure à un niveau prescrit. Cette condition peut être améliorée par une procédure itérative. De plus, nous sommes en mesure de traiter le cas de la disponibilité de clusters du mode de Markov, à condition que les matrices de certains systèmes ne varient pas dans un groupe donné, une hypothèse qui permet de traiter les systèmes de contrôle en réseau (NCS). Un exemple numérique montre l'applicabilité de la méthode et la compare avec les résultats précédents.
We investigate the location of poles of neutral systems with many chains of poles asymptotic to same points on the imaginary axis, this question being the first step towards stability analysis. In many cases, chains of poles are located on both sides of the imaginary axis implying then instability.
This paper introduces the concept of consistency for discrete-time switched linear systems having the switching function as a primary control signal to be designed, and also proposes a certification of how consistent is such switching function. A state feedback switching control strategy is strictly consistent whenever it improves performance compared to the ones of all isolated subsystems. It is proven that a min-type switching strategy is strictly consistent for classes of H2 and H∞ performance indexes. This property makes clear the importance of switching systems control design in both theoretical and practical application frameworks. The theory is illustrated by means of academic examples.
Nós propomos uma nova classe de sinais de perturbação a serem usados para o cálculo da norma de um sistema discreto sujeito a saltos markovianos. No caso geral, o sinal de perturbação pode, a cada instante de tempo, ser dependente do modo da cadeia de Markov e do estado do sistema. Neste artigo, nós assumimos que a perturbação é independente do modo de Markov e do estado do sistema, e nós denotamos tal sinal como offline ou em malha-aberta. Sob esta hipótese, condições suficientes para uma nova norma limitada denominada Hop são apresentadas através de desigualdades matriciais lineares, tanto para o caso onde a matriz de probabilidades de transição é arbitrária, quanto para o caso particular onde todas suas linhas são idênticas. Para uma cadeia de Markov com dois modos, isto é equivalente a considerar uma variável aleatória com distribuição de Bernoulli. Discutimos também a relação entre as normas Hop e H∞. Os resultados são ilustrados com exemplos numéricos.
Este artigo introduz o conceito de consistência para sistemas lineares com comutação em tempo discreto, sendo a função de comutação um sinal de controle a ser projetado, e prop˜õe uma certificação de qu˜ão consistente é a referida função. Uma estratégia de controle com comutação dependente do estado é estritamente consistente sempre que ela melhorar o desempenho do sistema global, quando comparado ao desempenho de cada subsistema isolado. É provado que uma estratégia de comutaçãoo do tipo mínimo é estritamente consistente para classes de índices de desempenho H2 e H∞. Esta propriedade coloca em evidência a importância de se realizar o projeto de controle para sistemas com comutação sob ambos os contextos, teórico e de aplicaçãoo prática. A teoria é ilustrada através de vários exemplos acadêmicos.
This thesis addresses the H∞ analysis and control of continuous commensurate time-delay systems by methods in frequency domain. First, the asymptotic behavior of the chains of poles are studied, and the conditions of stability for neutral systems with poles approaching the imaginary axis are given. The same analysis is done for fractional systems. In the sequel, a numerical method for locating all the stability windows as well as the unstable root-locus for classical and fractional system is given. We conclude the analysis part by providing the stability crossing curves of a class of distributed delay system. Starting the synthesis part, we design PID controllers for unstable fractional systems using a small-gain theorem approach. Finally, using the Rekasius substitution, we construct a linear time invariant comparison system that allows us to get information about stability and H∞-norm for classical time-delay systems. Using this approach it is possible to design state and output feedback controllers, as well as linear filters for this class of systems.
This article addresses the filtering design problem for discrete-time Markov jump linear systems (MJLS) under the assumption that the transition probabilities are not completely known. We present the methods to determine H2- and H∞-norm bounded filters for MJLS whose transition probability matrices have uncertainties in a convex polytope and establish an equivalence with the ones with partly unknown elements. The proposed design, based on linear matrix inequalities, allows different assumptions on Markov mode availability to the filter and on system parameter uncertainties to be taken into account. Under mode-dependent assumption and internal model knowledge, observer-based filters can be obtained and it is shown theoretically that our method outperforms some available ones in the literature to date. Numerical examples illustrate this claim
This paper addresses the H∞-stability analysis of neutral time-delay systems with multiple commensurate delays, including those with poles asymptotic to the imaginary axis. The location of asymptotic poles is completely described, and easy-to-check necessary and sufficient conditions of H∞-stability are derived. Robustness relative to a change in the delay or the parameters is discussed. Moreover, H∞-stabilizability by rational controllers is considered, and, finally, several examples are given.
This paper introduces a new procedure for H∞ filter design of time-delay linear systems. A finite-order LTI system, called comparison system, is defined in such a way that its H∞ norm is proven to be strongly related to the one of the time-delay system. Differently from what can be viewed as a common feature of filter design methods available in the literature to date, the one presented here treats the filtering design of time-delay systems with classical numerical routines based on Riccati equation and H∞ theory of LTI systems. The proposed algorithm is simple, efficient and easy to implement. Illustrative examples are solved and discussed in order to put in evidence the most relevant properties of the theoretical results. Furthermore, a practical application is presented.
This paper is concerned with H2 and H∞ filter design for discrete-time Markov jump systems. The Markov chain is used to model a lossy network and two different strategies used in practice are compared for the event of packet dropout. The zero-input strategy consists of providing the filter with null input in case of dropout, while the hold-input strategy consists of using the previous successfully transmitted value of the measurement as input in that case. We prove that both strategies are rigorously equivalent in terms of filtering performance. This result suggests that the zero-input strategy is always preferable than the hold-input strategy because its modeling is simpler and its implementation is cheaper than the latter. A numerical example illustrates the applicability of the results.
The aim of this paper is to cope with the H∞ control synthesis for time-delay linear systems. We extend the use of a finite order LTI system, called comparison system to H∞ analysis and design. Differently from what can be viewed as a common feature of other control design methods available in the literature to date, the one presented here treats time-delay systems control design with classical numeric routines based on Riccati equation and H∞ theory. An illustrative example and a practical application involving a 3-DOF networked control system are presented.
The aim of this paper is to present some results on the control synthesis of time-delay linear systems. Our objective is to find linear controllers able to increase the first stability window imposing that the delay-free system is stable. Our method treats time-delay systems control design with numeric routines based on Linear Matrix Inequalities (LMI) arisen from classical linear time invariant system theory coupled together with a unidimensional search. The proposed algorithm is simple, efficient and easy to be numerically implemented. Some examples illustrating state and output feedback design are solved and discussed in order to shed the light on the most relevant characteristic of the theoretical results. The paper ends with some discussion on further theoretical extensions of the proposed methodology.
This paper addresses the H∞ state-feedback control design problem of discrete-time Markov jump linear systems. First, under the assumption that the Markov parameter is measured, the main contribution is on the LMI characterization of all linear feedback controllers such that the closed loop output remains bounded by a given norm level. This results allows the robust controller design to deal with convex bounded parameter uncertainty, probability uncertainty and cluster availability of the Markov mode. For partly unknown transition probabilities, the proposed design problem is proved to be less conservative than one available in the current literature. An example is solved for illustration and comparisons.
The main point of this paper is on the formulation of a numerical algorithm to find the location of all unstable poles, and therefore the characterization of the stability as a function of the delay, for a class of linear fractional-order neutral systems with multiple commensurate delays. We start by the asymptotic position of the chains of poles and conditions for their stability, for a small delay. When these conditions are met, we continue by means of the root continuity argument, and using a simple substitution, we can find all the locations where roots cross the imaginary axis. We can extend the method to provide the location of all unstable poles as a function of the delay. Before concluding, some examples are presented.
This paper addresses how several models available for a measurement transmission network channel, like the generalized Gilbert-Elliot, Fritchman or McCullough ones, from a linear and time invariant plant to its filter can be incorporated into the more general framework of Markov jump linear systems filtering. Combined with transmission protocols that allow package failure recognition, the particular concept of cluster availability of the Markov modes becomes appealing. Numerical examples are explored to show applicability of the results. The design of the filter is done using linear matrix inequalities (LMIs).
This paper addresses the H∞-stability of linear fractional systems with multiple commensurate delays, including those with poles asymptotic to the imaginary axis. The asymptotic location of the neutral chains of poles are obtained, followed by the determination of conditions that guarantee a finite H∞ norm for those systems with all poles in the left half-plane of the complex plane.
This paper is concerned with H2 and H∞ filter design for discrete-time Markov jump systems. The usual assumption of mode-dependent design, where the current Markov mode is available to the filter at every instant of time is substituted by the case where that availability is subject to another Markov chain. In other words, the mode is transmitted to the filter through a network with given transmission failure probabilities. The problem is solved by modeling a system with N modes as another with 2N modes and cluster availability. We also treat the case where the transition probabilities are not exactly known and demonstrate our conditions for calculating an H∞ norm bound are less conservative than the available results in the current literature. Numerical examples show the applicability of the proposed results.
This paper focuses on a numerical procedure to stability analysis of neutral time-delay systems with multiple commensurate delays. First, we give the asymptotic location of chains of poles, and conditions for their stability, for an arbitrary small delay. In this case, we can continue by using the root continuity argument, and by means of a simple substitution, find the location where roots cross the imaginary axis through numerical integration. Similarly, we can adapt the same technique to provide the location of all unstable poles (and eventually some stable ones). Several examples are presented and discussed.
Este artigo aborda como diversos modelos disponíveis, tais como os de Gilbert-Elliot, Fritchman ou McCullough, para a transmissão de uma medida entre um sistema linear invariante no tempo e um filtro por uma rede de comunicações podem ser incorporados à classe dos sistemas lineares com saltos markovianos e probabilidades de transição parcialmente conhecidas. Quando associados com um protocolo de transmissão que permita reconhecer falhas na transmissão de pacotes, o conceito de disponibilidade parcial do modo tornase atrativo. Um exemplo mostra a aplicabilidade dos resultados. O projeto do filtro é feito com o uso de desigualdades matriciais lineares.
Este artigo se prop˜oe a introduzir um sistema de comparação linear e invariante no tempo para auxiliar na análise de estabilidade e no projeto de controladores H∞ para sistemas com atraso. Definimos um sistema racional de ordem 2n, o qual denominamos sistema de comparaçãao, que é associado a um sistema com atraso com n variáveis de estado de tal forma que tanto a análise de estabilidade como o projeto de controladores H∞ para o sistema de comparação s˜ao relacionados com aqueles do sistema com atraso. Neste artigo, realizaremos o projeto de controladores via realimentação de estado para demonstrar a utilidade da metodologia proposta.
Ce travail présente une méthode numérique pour calculer la position de tous les pôles instables, et ainsi vérifier la stabilité des systèmes fractionnaires avec retards du type neutre. Ces systèmes ont une infinité de pôles dans le plan complexe. On commence par donner la position asymptotique des chaînes de pôles et les conditions de stabilité pour de petits retards. On continue en utilisant l’argument de continuité des racines et on cherche les pôles qui sont sur l’axe imaginaire. Avec des méthodes de continuation, on peut donner la position de tous les pôles instables. On termine en exposant un exemple de la méthodologie proposée
This technical note addresses the discrete-time Markov jump linear systems H∞ filtering design problem. First, under the assumption that the Markov parameter is measurable, the main contribution is the linear matrix inequality (LMI) characterization of all linear filters such that the estimation error remains bounded by a given H∞ norm level, yielding the complete solution of the mode-dependent filtering design problem. Based on this result, a robust filter design able to deal with polytopic uncertainty is considered. Second, from the same LMI characterization, a design procedure for mode-independent filtering is proposed. Some examples are solved for illustration and comparisons.
This paper addresses the H2 and H∞ dynamic output feedback control design problems of discrete-time Markov jump linear systems. Under the mode-dependent assumption, which means that the Markov parameters are available for feedback, the main contribution is the complete characterization of all full order proper Markov jump linear controllers such that the H2 or H∞ norm of the closed loop system remains bounded by a given prespecified level, yielding the global solution to the corresponding mode-dependent optimal control design problem, expressed in terms of pure linear matrix inequalities. Some academic examples are solved for illustration and comparison. As a more consequent practical application, the networked control of a vehicle platoon using measurement signals transmitted in a Markov channel, as initially proposed in [P. Seiler and R. Sengupta, IEEE Trans. Automat. Control, 50 (2005), pp. 356–364], is considered.
This paper addresses the H∞ stability analysis of neutral time-delay systems with multiple commensurate delays including those with poles asymptotic to the imaginary axis. This extends previous work where only the single delay case was considered. Some frequency-domain tests for this kind of stability are proposed.
This paper considers the problem of H∞ filter design for time-delay systems. An LTI finite dimensional system, called comparison system, is constructed in order to exploit recent results on stability analysis and H∞ norm calculation, which were proven to be strongly related to those of time-delay systems. Differently of what can be viewed as a common feature of filter design methods available in the literature to date, the one presented here addresses time-delay systems filtering with classical numeric routines based on Riccati equation and H∞ theory of LTI systems. The design algorithm is simple, efficient and easy to implement. An illustrative example is solved and is used to put in evidence the most important characteristic of the design procedure.
This paper focuses on the characterization of the stability crossing curves of a class of linear systems with shifted fractional gamma-distributed delay. First, we describe the frequency crossing set, i.e., the set of frequencies where the characteristic roots may cross the imaginary axis as the parameters change. Next, we describe the stability crossing curves, i.e., the set of parameters (average delay, gap) such that there exists at least one characteristic root on the imaginary axis. Such stability crossing curves divide the parameter-space into different regions, such that within each such region, the number of strictly unstable roots is fixed. The classification of the stability crossing curves is also discussed and illustrated.
This paper addresses the H∞ and the H2 filtering design problems for linear systems whose outputs are transmitted through a Markovian channel. Previous works have used simplified Gilbert-Elliot network channel models to address burst errors in the output. We will use a generalized Gilbert-Elliot model, increasing the number of Markov modes. With this extended model it is not possible anymore to know exactly what the Markov mode at every instant of time is, but only that it belongs to a given subset we call cluster. The design of the filter is done using Linear Matrix Inequalities (LMIs).
This work addresses the H∞ stability analysis of neutral time-delay linear systems with multiple commensurate delays, including those with chain of poles asymptotic to the imaginary axis. Some frequency-domain tests for this kind of stability are proposed.
Classical H∞-stabilizing PID controllers are designed for linear time invariant fractional systems and the effect of input-output time delay on the range of allowable controller parameters is investigated. The allowable PID controller parameters are determined from a small gain type of argument used earlier for finite dimensional plants.
This paper addresses the H2 filtering design problem of discrete-time Markov jump linear systems. First, under the assumption that the Markov parameter is measured, the main contribution is on the LMI characterisation of all filters such that the estimation error remains bounded by a given H2 norm level, yielding the complete solution of the mode-dependent filtering design problem. Based on this result, a robust filter design to deal with convex bounded parameter uncertainty is considered. Second, from the same LMI characterisation, a design procedure for mode-independent filtering design is proposed. Some examples are solved for illustration and comparison.
This paper addresses the H∞ dynamic output feedback control design problem of discrete-time Markov jump linear systems. Under the mode-dependent assumption, which means that the Markov parameters are available for feedback, the main contribution is on the complete characterization of all full order proper controllers such that the H∞ norm of the closed loop system remains bounded by a given pre-specified level, yielding the global solution to the corresponding mode-dependent optimal control design problem, expressed in terms of pure linear matrix inequalities. LMIs. A practical application, consisting the networked control of a vehicle platoon using measurement signals transmitted in a Markov channel, as initially proposed in Seiler, P and Sengupta, R., (2005), is considered.
This paper addresses the H2 and H∞ filtering design problems of discrete-time Markov jump linear systems. First, under the assumption that the Markov parameter is measured, the main contribution is on the LMI characterization of all filters such that the estimation error remains bounded by a given norm level, yielding the complete solution of the mode-dependent filtering design problem. Based on this result, a robust filter design to deal with convex bounded parameter uncertainty is considered. Second, from the same LMI characterization, a procedure for mode-independent filtering design is proposed. An example is solved for illustration and comparisons with the methods available in the literature.
Esta dissertação tem por principal objetivo o estudo do problema de projeto de filtros H2 e H∞de sistemas lineares discretos com parâmetros sujeitos a saltos markovianos. Inicialmente, sob a hipótese de que o parâmetro da cadeia de Markov é mensurável, fornecemos a caracterização de todos os filtros tais que o erro de estimação é limitado por uma norma, produzindo a solução completa do problema de projeto dependente do modo da cadeia. Baseado neste resultado, consideramos o projeto do filtro robusto capaz de lidar com incertezas paramétricas. Em seguida, propomos um procedimento de projeto de filtros sem o conhecimento da cadeia. Todos os problemas de filtragem são expressos em termos de desigualdades matriciais lineares. Os resultados teóricos são ilustrados através de uma aplicação prática que consiste na comunicação de dados através de um canal markoviano.
Has taught disciplines at undergraduate and graduate levels. Students looking for courses material shall access the University Moodle environment.
Logical concepts. Basic circuits. Minimization of Boolean functions. Numbering systems. Binary arithmetic. Codes. Contact circuits. Synthesis of combinational circuits. Memory circuits. Sequential circuits. Design of sequential circuits. Mealy and Moole machines. Project counters, decoders and multiplexers. Multivibrators: astable, monostable and oscillators. Programmable logic devices.
Combinational circuits. Flip-flops, counters and timers. Sequential circuits. Digital to analog and analog to digital converter. Programmable logic devices.
Amplifiers and signal conditioners. Principal analog filters. D/A and A/D converters, sampling and quantization effects. Z- and discrete Fourier transform. Finite and infinite impulse response digital filters. Experiments showing the sampling theorem and its effects, typical analog and digital filters and frequency response analysis.
Recognize and solve convex optimization problems that arise in applications. Convex sets, functions and optimization problems. Least-square, quadratic and semidefinite programming, minimax, extreme volume problems. Optimality conditions, duality and applications. Study of practical problems in engineering.
Definition of LMIs. Classical problems in Control Theory solved by LMIS. Schur Complement, Finsler Lemma, Variable Elimination. Convex Optimization. Stability Analysis. Norms. State and Ouptut Feedback. Study of practical problems in engineering.
General concepts of embedded systems. Microprocessor architecture, micro-controllers and digital signal processors. Basic concepts of real-time systems. Methodology of embedded systems design. State machine systems. SDL methodology. Time management in computer systems. Programming languages and operating systems to real time. Practical examples of system design.
I would be happy to talk to you if you need my assistance in your research or whether you need consulting support for your company.
You can find me at my office BE301 located on the second floor at the School of Mechanical Engineering at University of Campinas.
I am at my office every day from 8:00 until 18:00, but you may consider a call or an email to fix an appointment.